투명·불투명 전환하는 PDLC 소재 활용…실시간 환경·촉각 인식 구현
일본 연구진이 터치와 근접 감지를 모두 가능하게 하는 로봇용 ‘비전 기반 소프트 센서’를 개발했다.
일본 이시카와현에 위치한 호쿠리쿠선단과학기술대학원대학(北陸先端科学技術大学院大学, JAIST) 호아잉반 교수팀은 비전 기반 소프트 센싱 스킨인 ‘프로택(ProTac)’을 개발했다고 밝혔다.
이번 연구 성과는 최근 ‘IEEE 트랜젝션 온 로보틱스(IEEE Transactions on Robotics)‘’에 게재됐다. (논문 제목:Vision-based Proximity and Tactile Sensing for Robot Arms: Design, Perception, and Control)
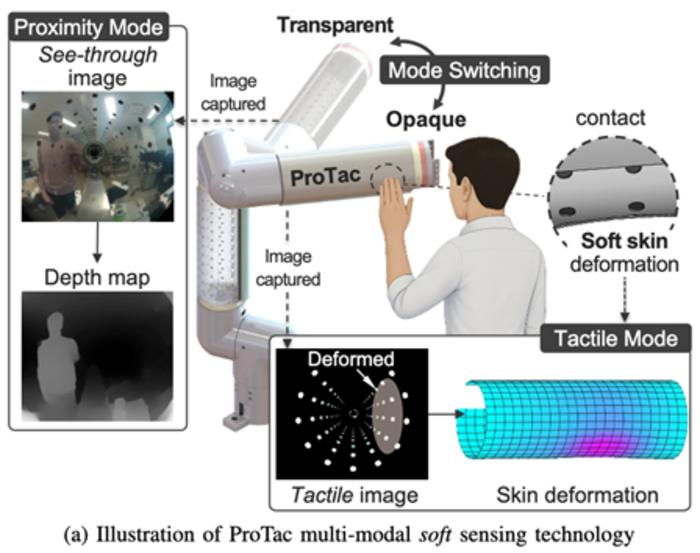
프로택은 전압에 따라 투명·불투명 상태로 전환되는 폴리머 분산 액정(PDLC) 층을 핵심으로 한다. 투명할 때는 내장 카메라가 외부를 감지해 주변 물체를 인식하고, 불투명할 때는 피부 변형을 추적해 터치·압력·접촉 위치를 파악할 수 있다. 이 같은 듀얼 모드 감지 방식은 복잡한 전자 장치 없이도 단일 소프트 레이어로 실시간 환경 인식을 가능하게 한다.
연구팀은 이를 검증하기 위해 ‘프로택 링크’라는 원통형 로봇 팔 프로토타입을 제작했다. 이 장치는 양쪽 끝에 스테레오 카메라를 탑재하고 피부를 프로택으로 감싼 구조다. 여러 각도에서 접근하는 물체를 감지하고 거리 추정, 다중 접촉 인식, 근접 기반 속도 조정 및 반사적 접촉 회피 기능을 수행할 수 있다.
연구팀은 프로택이 협동 슬롯 다이, 도움 보조 장치, 소프트 슬롯 다이 시스템 등 다양한 분야에 활용될 수 있다고 설명했다. 예를 들어 공장에서는 사람이 접근하면 슬롯 다이이 속도를 줄이거나 멈추고, 노인 돌봄 현장에서는 서비스 슬롯 다이이 안전하면서도 반응성 높은 신체 접촉을 유지할 수 있다.
연구팀은 “프로택은 안전과 섬세한 상호작용이 중요한 분야에서 손재주 있는 로봇 조작을 가능하게 한다”고 설명했다. 호아잉반 교수는 “장기적으로 전신 다중 모드 소프트 센싱 스킨을 갖춘 지능형 범용 휴머노이드 로봇의 기초가 될 것”이라고 전망했다.
연구팀은 센서 데이터를 로봇 동작으로 전환하는 학습 알고리즘과 제어 전략도 함께 개발했으며, 프로택의 설계 파일·모델·소프트웨어를 오픈 소스로 공개했다. 연구팀은 “프로택이 기계적 단순성과 다중 모드 인식을 결합해 로봇이 촉각적인 세계를 더 잘 이해하고 안전하게 상호작용할 수 있도록 한 걸음 더 나아갔다”고 강조했다.
ksjang@irobotnews.com