시각·촉각·청각 통합한 ‘옴니 모달’ 기술로 고정밀 작업 구현
중국 로봇 기업 제리스(Zerith, 零次方)가 로봇의 ‘오감’을 활성화해 고정밀 작업을 가능케 하는 신개념 학습 솔루션을 발표했다.
제리스는 19일 허페이(合肥)에서 열린 행사에서 중국 최초로 ‘옴니 모달(Omni-modal) 임바디드 데이터 풀 링크’ 솔루션을 공개했다. 이 기술은 로봇의 지능형 학습 능력을 획기적으로 향상시켜, 휴머노이드 로봇이 ‘두부 집기’와 같은 섬세한 작업도 성공적으로 수행할 수 있도록 한다. 제리스는 이 솔루션이 다양한 산업군에 로봇을 적용할 수 있는 무한한 가능성을 열어줄 것으로 기대하고 있다.
제리스는 중국 임바디드 인텔리전스 휴머노이드 마카오 슬롯 머신 잭팟 연구개발 기업으로서 칭화대학과 장화이첨단기술협동혁신센터(江淮前沿技术协同创新中心)에서 인큐베이팅된 기업이다.
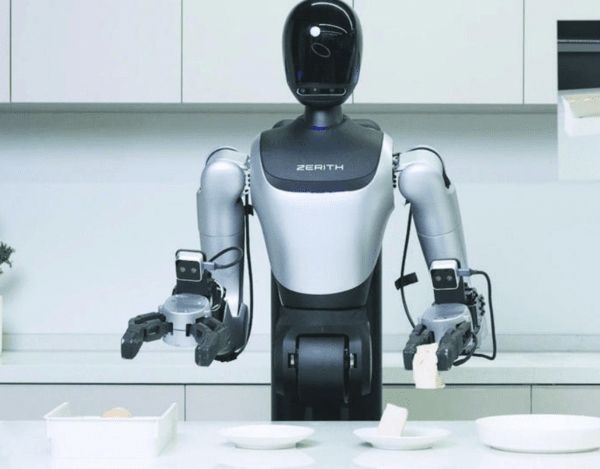
이번 기술은 기존의 멀티 모달 학습을 넘어선 진일보한 성과로 평가된다. 일반적인 로봇 훈련 프로그램이 시각과 관절의 연동, 혹은 의미-시각-관절의 반응 구조에 한정된 것과 달리, 제리스의 ‘ZERITH-H1’ 로봇은 자체 멀티 모달 센서를 통해 ▲2차원 시각 정보 ▲3차원 공간 정보 ▲관절 정보 ▲힘·촉각 정보 ▲청각 정보를 종합적으로 수집하고 분석할 수 있다. 이를 통해 마치 인간처럼 오감을 동원한 학습이 가능하다.
회사가 공개한 동영상에 따르면, 마카오 슬롯 머신 잭팟은 트레이너의 동작에 맞춰 쌍둥이처럼 상호작용하며 단계별로 춤을 추기도 한다. 트레이너가 웨어러블 AR 기기를 손에 들고 마카오 슬롯 머신 잭팟과 연결하면, ZERITH-H1은 실시간으로 데이터를 수집하며 훈련에 돌입한다.
제리스는 이 기술의 핵심 구성요소 중 하나로 ‘제리스-VR 앱’을 제시했다. 해당 앱은 가상 세계와 물리 세계 간 상호작용의 통로 역할을 하며, 로봇의 다양한 센서와 결합돼 멀티 모달 인식을 가능케 한다. 사용자는 로봇을 직접 조작하면서 주변 환경에서 유의미한 데이터를 직관적이고 효율적으로 수집할 수 있다.
제리스 측은 “기존 임바디드 인텔리전스 모델은 데이터 누락, 복잡한 수집 프로세스 등의 한계가 있었다”며 “VR 앱과 ZERITH-H1을 결합한 이번 솔루션은 게임하듯 쉽고 빠르게 데이터를 수집할 수 있어 실효성이 높다”고 설명했다.
특히 ZERITH-H1은 고해상도 비전과 정밀 촉각 센서가 통합된 그리퍼를 탑재, 힘의 세기와 촉각을 정밀하게 감지해 두부처럼 쉽게 부서질 수 있는 재료도 정확하게 집을 수 있다.
이와 함께 수집된 데이터는 자체 개발한 임바디드 데이터 관리 플랫폼을 통해 ▲분류 ▲정리 ▲라벨링 ▲검색 등의 전 과정을 체계적으로 관리한다. 매체는 이를 “학습 자료를 주제별로 정리해 책꽂이에 꽂아두는 것과 같은 구조”라고 비유했다.
제리스는 이번 ‘옴니 모달 임바디드 데이터 풀 링크’ 솔루션이 로봇 훈련의 데이터 수집부터 현장 배치까지 전 과정을 아우르는 혁신 기술로, 기존 솔루션의 한계를 뛰어넘어 다양한 산업 분야에 활용될 수 있을 것으로 전망했다.(제휴=중국로봇망)