독일 막스플랑크 지능시스템연구소, 물질 특성 규명
'기능성 경도 변화' 구조에서 촉각 감지 새 단초 발견

독일 막스플랑크 지능시스템연구소(MPI-IS) 산하 촉각지능 연구부(Haptic Intelligence Department)가 코끼리 수염의 독특한 물질적 특성을 규명하고, 이를 로봇 촉각 센서에 응용할 수 있다는 연구 결과를 발표했다.
이번 연구 성과는 국제 학술지 ‘사이언스(Science)’에 지난 12일(현지시간) 발표했다. (논문 제목:Functional gradients facilitate tactile sensing in elephant whiskers) 이 연구는 차세대 지능형 센서 개발의 새로운 전기가 될 것으로 기대된다.
연구팀은 코끼리 코를 덮고 있는 약 1000개의 수염에서 밑동은 단단한 플라스틱처럼 뻣뻣하고 끝부분은 부드러운 고무처럼 유연한 '기능성 경도 변화(functional gradient)'를 발견했다. 이 구조 덕분에 코끼리는 두꺼운 피부와 나쁜 시력에도 불구하고 토르티야 칩을 부수지 않고 집거나 땅콩을 정밀하게 잡아내는 등 정교한 촉각을 발휘할 수 있다.
이는 쥐나 생쥐의 수염처럼 전체적으로 균일하게 뻣뻣한 구조와는 전혀 다른 것으로, 고양이 수염에서도 동일한 경도 변화 패턴이 확인됐다.
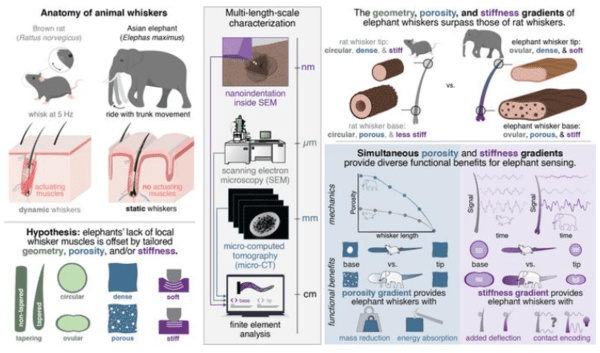
연구팀은 코끼리 코 수염의 형태(기하 구조), 다공성(기공의 숫자), 부드러운 정도(재료 경도)를 파악하기 위해 정밀 분석을 진행했다. 연구팀은 처음에 코끼리 수염이 쥐나 생쥐의 가늘고 뾰족한 수염처럼 단면이 원형이고 속이 꽉 차 있으며 경도가 전체적으로 균일할 것으로 예상했다. 그러나 마이크로 CT 촬영 결과 코끼리 수염은 두껍고 날처럼 납작한 단면 구조를 지니고 있으며, 밑동은 속이 비어 있고 양의 뿔이나 말굽 구조와 유사한 여러 개의 긴 내부 채널이 있다는 사실이 밝혀졌다. 이러한 다공성 구조는 수염의 무게를 줄이는 동시에 충격 저항성을 높여준다는 것이다.
연구를 이끈 앤드류 슐츠(Andrew Schulz) 박사는 이 원리를 '체화 지능(embodied intelligence)'이라고 설명했다. "경도 변화가 코끼리가 각각의 수염 어느 지점에서 접촉이 발생하는지 감지할 수 있게 해주는 일종의 지도 역할을 한다. 이 모든 정보가 수염의 기하 구조, 다공성, 경도 안에 내재돼 있다"는 설명이다.
이 같은 코끼리 수염 구조는 복잡한 연산 없이도 재료 설계만으로 정밀한 감지 능력을 구현할 수 있다는 점을 보여준다.
슐츠 박사는 "코끼리 수염의 경도 변화를 모방한 바이오 영감 센서를 개발하면 높은 연산 비용 없이 지능적인 재료 설계만으로 정밀한 접촉 정보를 얻을 수 있다"고 밝혔다. 이는 현재 로봇 촉각 센서의 가장 큰 난제인 '실시간 처리 부담'을 소재 수준에서 해결할 수 있다는 의미다.
연구팀은 실제로 3D 프린팅으로 경도 변화를 재현한 수염 모형을 제작해 개념을 검증했다. 캐터린 쿠첸베커(Katherine Kuchenbecker) 교수가 이 모형으로 연구소 복도의 기둥과 난간을 두드리며 걷다가, 수염의 부위에 따라 촉감이 뚜렷하게 다르다는 사실을 눈으로 보지 않고도 직접 체감한 것이 연구의 전환점이 됐다. 소재 자체가 정보를 처리하는 셈이다.
연구팀은 엔지니어링, 재료과학, 신경과학을 아우르는 학제간 접근으로 이번 발견을 로봇공학과 지능형 시스템에 적용하는 후속 연구를 진행할 계획이다. 신경과학 분야 공동저자인 레나 카우프만 박사도 "수염 재료 특성과 신경 연산의 관계를 심층적으로 연구할 수 있는 흥미로운 가능성이 열렸다"고 평가했다.
쿠첸베커 교수는 "강력한 코끼리가 어떻게 그토록 섬세한 촉각을 갖는지 3년간의 연구 끝에 비밀을 밝혀냈다"며 "이번 발견은 자연에서 영감을 받은 로봇 센서 개발에 새로운 방향을 제시할 것"이라고 말했다.
이번 연구는 MPI-IS 촉각지능연구부를 중심으로 베를린 훔볼트대, 슈투트가르트대 등 5개 연구그룹이 공동으로 수행했다.
백승일 기자 robot3@irobotnews.com