'네이처 머신 인텔리전스'에 논문 발표…제조·의료·물류 등 다낭 카지노 슬롯 머신 자동화에 전환점 기대
미끄럽거나 비대칭적으로 생긴 물체를 안전하게 잡을 수 있는 로봇용 미끄럼 방지 기술이 개발됐다.
영국 서리 대학교가 주도한 연구팀은 로봇이 물체를 안전하게 잡고 다루는 방식을 획기적으로 개선할 수 있는 미끄럼 방지 기술을 개발했다고 밝혔다.
이번 연구 성과는 '네이처 머신 인텔리전스(Nature Machine Intelligence)'에 발표됐다.(논문 제목:Bioinspired trajectory modulation for effective slip control in robot manipulation) 이번 기술 혁신은 제조, 의료 등 다양한 산업 분야에서 더욱 안전하고 신뢰할 수 있는 자동화 시대를 열 것으로 기대를 모은다.
연구팀은 다낭 카지노 슬롯 머신이 물체가 미끄러질 시점을 미리 예측하고 실시간으로 움직임을 조정하여 낙하를 방지하는 새로운 접근 방식을 개발했다. 마치 사람이 접시를 들고 가다가 미끄러질 때 본능적으로 손의 움직임을 조절하는 것과 유사한 방식이란 설명이다. 기존 다낭 카지노 슬롯 머신들이 단순히 강한 악력에 의존했던 것과 달리, 이 생체 영감형(bio-inspired) 방식은 다낭 카지노 슬롯 머신이 더욱 지능적으로 움직이며 섬세한 물체에 손상을 주지 않고도 안전하게 잡을 수 있도록 한다.
논문 주요 저자인 아미르 갈람잔(Amir Ghalamzan) 서리대 로봇공학 담당 교수는 "사람들은 접시가 미끄러지기 시작하면 무조건 세게 쥐는 대신, 속도를 늦추거나 기울이거나 위치를 바꿔 떨어지지 않도록 한다. 로봇도 이제 인간과 같은 방식으로 행동하도록 가르쳤다. 미끄러질 조짐이 보이면 자동으로 움직임을 조절하여 물체를 안전하게 유지할 수 있다"고 말했다.
갈람잔 교수는 이 기술이 미래 자동화에 혁명적인 변화를 가져올 것이라고 강조했다. 그는 "의료 분야에서 수술 도구를 다루거나, 제조 분야에서 섬세한 부품을 조립하거나, 물류에서 다루기 힘든 소포를 분류하거나, 심지어 가정에서 사람들을 돕는 등 다양한 분야에서 활용될 수 있을 것"이라고 덧붙였다.
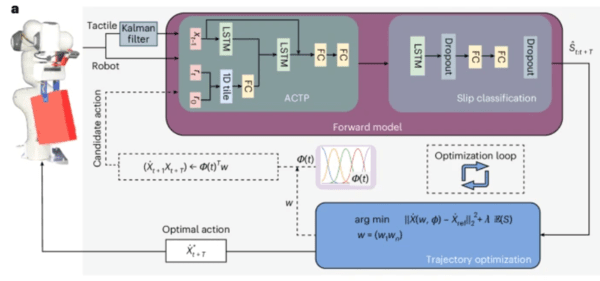
연구팀은 학습된 '촉각 예측 모델(tactile forward model)'에 기반한 예측 제어 시스템을 통해 로봇이 물체의 움직임을 지속적으로 분석하고 미끄럼을 예측할 수 있음을 입증했다. 또한, 이 시스템이 훈련되지 않은 물체나 움직이는 이동 경로에서도 효과적으로 작동하여 실제 환경에 대한 높은 일반화 가능성을 보여주었다.
이번 연구는 링컨대학교, 애리조나 주립대, 한국과학기술원(KAIST) 및 도시바 유럽 캠브리지 연구소와의 협력을 통해 진행됐다. 특히, 인간과 로봇 모두에서 미끄럼 방지를 위한 궤적 변조(trajectory modulation)의 효과를 입증하고 정량화한 최초의 연구라는 점에서 의미가 깊다는 것이다.