텔레오퍼레이션·모방 학습·강화학습 등 첨단 슬롯 머신 저금통 연구 대응
일본 도쿄에 위치한 엔액틱(Enactic)이 완전 오픈소스 기반의 휴머노이드 로봇팔 개발 플랫폼인 ‘오픈암(OpenArm)’을 공식 출시했다고 23일 밝혔다.
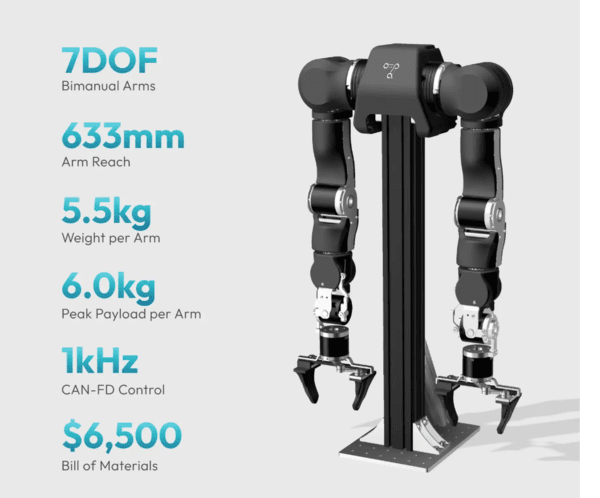
'오픈암'은 인간과 공존할 수 있는 환경에서의 안전성과 실용성의 양립을 목표로 개발된 로봇 팔 플랫폼이다. 기계적 유연성을 중시하는 QDD(Quasi-Direct Drive, 유사 직접 구동) 모터를 채택해 정교하고 유연한 동작을 구현하며, 하드웨어 설계부터 소프트웨어 제어까지 전 영역을 오픈소스화한 것이 특징이다.
QDD는 감속기(기어)를 최소화하거나 없앤 모터 구동 방식이다. 일반적인 로봇 구동계는 고속 모터에 감속기를 물려 토크를 확보하는데, 이 경우 마찰이나 백래시(backlash, 기어 유격) 등의 문제가 발생해 제어 정밀도나 반응성이 떨어진다. QDD는 사람과의 물리적 상호작용이 중요한 환경에 적합하다.
오픈암 플랫폼은 단순한 로봇팔이 아니라 ▲텔레오퍼레이션(원격 조작) ▲모방 학습 ▲시뮬레이션 기반 강화학습 ▲실세계 데이터 수집 등 폭넓은 AI 로봇 연구와 응용 개발에 유연하게 대응할 수 있도록 설계됐다는 게 회사 측 설명이다.
오픈암은 올해 2월 베타판이 우선 공개되었으며, 전 세계 개발자 및 연구자들로부터 활발한 문의가 이어지고 있다고 한다. 엔액틱은 디스코드(Discord) 기반의 사용자 커뮤니티를 통해 실시간 피드백 체계를 구축하고 있으며, 향후 대학, 연구소, 기업 등과의 공동연구 및 파트너십을 확대해 실용적 휴머노이드 기술의 발전에 기여한다는 방침이다.
엔액틱은 특히 고령자 돌봄 및 서비스 산업, 가정용 로봇 분야에 있어, 사람과 함께 일할 수 있는 ‘안전하고 실용적인 휴머노이드’ 도입을 핵심 전략으로 삼고 있다. 실환경 데이터 수집을 바탕으로 기반 AI 모델 개발을 촉진하며, 심각한 인력난을 겪고 있는 케어 산업에서의 생산성 향상을 주요 목표로 제시했다.