만드로, 원익로보틱스, 브이디, KIST, 한국생산기술연구원, 한양대 ERICA캠퍼스, 블루로빈과 컨소시엄 구성
하이젠알앤엠이 휴머노이드용 핵심부품인 액추에이터의 국산화에 나선다
산업통상자원부는 지난 7월 29일 국가R&D 사업과제인 ‘휴머노이드 액추에이터 개발’ 프로젝트 총괄주관 기관에 하이젠알앤엠을 선정했다고 밝혔다.
총 사업비 94억원 규모의 이 프로젝트는 2025년 7월부터 약 42개월간 진행된다. 정부는 79억원의 자금을 지원한다. 총괄 주관기관에 선정된 하이젠알앤엠은 만드로, 원익로보틱스, 브이디, 한국과학기술연구원(KIST), 한국생산기술연구원, 한양대 ERICA캠퍼스, 블루로빈과 컨소시엄을 구성해 액추에이터와 로봇 손를 개발한다.
제품 개발이 완료되면, 휴머노이드 로봇에 장착해 제조와 서비스 영역에서 실증을 진행할 예정이다. 숨가쁘게 진행되는 글로벌 AI 휴머노이드 개발 경쟁 과정에서 국내 소부장산업의 경쟁력을 제고하는 계기가 될 것으로 보인다.
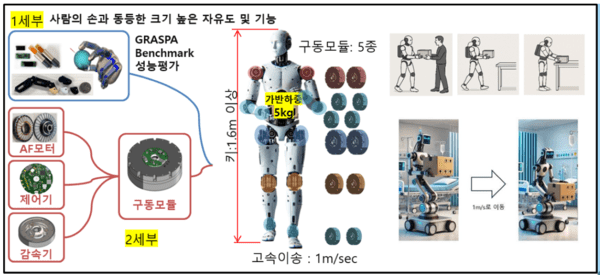
휴머노이드용 차세대 액추에이터는 AFPM 모터, 사이클로이드 치형 기술 등 기능이 채택된다.
AFPM 모터는 일반적으로 사용되는 영구자석 모터에 비해 동일한 크기에서 더 많은 토크를 생성할 수 있어 고출력·경량화·고효율·정밀제어가 필요한 휴머노이드 제작시 유리할 전망이다. 또한 사이클로이드 치형 기반 신개념 유성감속기를 적용함으로써 하모닉 드라이브라고 불리는 SWG(Strain Wave Gear)의 장점은 취하면서, 단점으로 지적되는 고비율 감속비에서 높은 효율과 ‘역구동성(Backdrivability)’ 확보가 가능하다. 역구동성은 로봇 설계시 휴머노이드, 서비스 로봇, 협동 로봇에 매우 중요한 개념이다. 외부에서 가해지는 힘에 의해 로봇의 구동부(모터, 감속기 등)가 자연스럽게 움직일 수 있는 능력을 제공한다.
이 액추에이터는 구동제어기에 IMU 센서와 듀얼 엔코더를 내장하고 지능형 외란관측기를 탑재해 하체 보행시 충격 흡수, 중력보상제어, 계단 오르기ㆍ내리기의 안전한 보행이 가능하다. 또한 카 심바 슬롯팔의 정밀 조작과 인간과 협업 작업시 힘 상호작용 및 팔관절의 피로누적 완화 등을 통해 사람처럼 자연스럽고 유연하게 움직이는 휴머노이드 카 심바 슬롯을 구현할 수 있다.
하이젠알앤엠은 이 같은 기술이 적용된 액추에이터와 로봇 손이 휴머노이드 생태계에 구동모듈 선택지를 넓히는데 도움을 줄수 있다고 강조했다. 아울러 이번 과제를 통해 성능과 원가 경쟁력을 높인 제품을 개발해 국내는 물론 글로벌 시장에 내놓을 계획이라고 밝혔다.