도요타연구소(TRI)와 협력 연구 진행
보스턴 다이나믹스가 거대행동모델(LBMㆍLarge Behavior Model)을 적용한 최신 휴머노이드 로봇 ‘아틀라스(Atlas)’의 작업 동영상을 공개했다. 이번 기술 개발은 도요타자동차의 연구기관인 도요타연구소(TRI)와 보스턴 다이나믹스 AI 연구팀의 긴밀한 공동 연구를 통해 이뤄져, 양사 간의 협력 시너지를 입증했다.
양사는 범용 휴머노이드 로봇 개발 가속화를 목표로 지난해 10월 공동 연구 협약을 체결한 이래 꾸준히 협력해왔다. 보스턴 다이나믹스는 “휴머노이드 로봇 아틀라스가 장기적인 작업을 수행할 수 있도록 '엔드 투 엔드(End-to-End)' 언어 조건부 정책을 구축하고 있다”고 밝혔다.
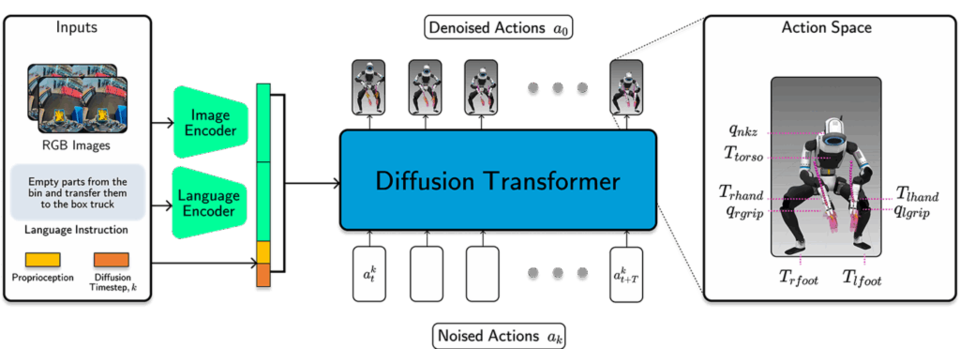
이번 기술의 핵심은 AI 로봇 분야에서 주목받는 ‘엔드 투 엔드(End-to-End)’ 신경망 기술의 도입이다. 이는 입력부터 출력까지의 모든 과정을 하나의 통합된 모델이나 시스템에서 직접 처리하는 방식을 의미한다. 기존 로봇 제어 방식이 ‘인식 → 이해→계획 → 제어’와 같이 여러 단계를 거쳤던 것과 달리, 엔드 투 엔드 신경망은 카메라 이미지나 센서 데이터와 같은 입력 데이터를 직접 받아 로봇의 모터 움직임이나 관절 각도와 같은 출력 행동을 즉시 결정하고 실행한다.
이러한 방식은 사람이 세부적인 규칙을 일일이 설계할 필요 없이, 대규모 데이터를 활용한 강화 학습을 통해 로봇이 고도화된 행동을 습득할 수 있다는 장점이 있다. 보스턴 다이나믹스와 도요타 연구소(TRI)는 이 방식을 활용해 아틀라스 로봇을 훈련시키고 있다. 훈련된 신경망은 ‘정책(Policy)’이라고 불리며, 특정 상황에 어떤 행동을 해야 하는지를 학습하게 된다.
거대행동모델(LBM)은 다음 네 가지 주요 단계를 거쳐 구축된다.
△원격 조작(Teleoperation)을 통한 데이터 수집:연구자들이 마닐라 카지노 슬롯 머신을 직접 원격으로 조작하며 아틀라스가 걷거나 물체를 잡는 등 실제 작업을 수행하는 과정을 기록하여 다양한 행동 데이터를 수집한다.
△데이터 처리 및 선별: 수집된 방대한 데이터를 정리하고 학습에 적합하도록 가공하는 과정을 거친다.
△신경망 정책 훈련: 정리된 데이터를 기반으로 엔드 투 엔드 신경망 모델을 학습시킨다. 이 모델은 입력된 데이터에 대해 가장 적절한 출력 행동을 예측하도록 최적화된다.
△정책 평가: 최종적으로 훈련된 모델이 실제 환경에서 얼마나 효율적이고 정확하게 작동하는지 평가하여 성능을 검증한다.
이러한 협력과 기술적 진보는 휴머노이드 마닐라 카지노 슬롯 머신이 더욱 복잡하고 예측 불가능한 환경에서도 자율적으로 임무를 수행할 수 있는 가능성을 열었다는 평가다.
ksjang@irobotnews.com