중국 다롄이공대 연구팀, 논문 발표
잡초 씨앗 꼬투리의 독특한 폭발 메커니즘에서 영감을 받아 에너지를 효율적으로 조절할 수 있는 차세대 핑크 슬롯 사이트 그리퍼가 개발됐다. 이 혁신적인 그리퍼는 기존 핑크 슬롯 사이트 그리퍼의 한계인 느린 반응 속도와 높은 에너지 소비 문제를 해결할 수 있을 것으로 기대를 모은다.
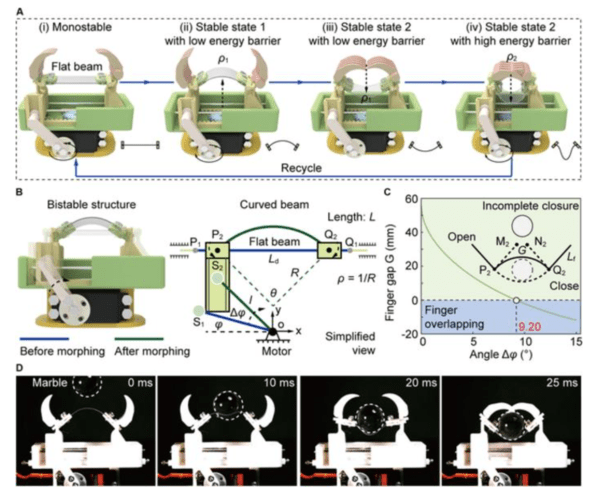
중국 다롄이공대 연구팀은 ‘이중 안정 구조(bistable structures)’에 주목했다. 이중 안정 구조는 두 가지 안정적인 기계적 상태(열린 상태와 닫힌 상태)를 가지며, 한번 전환되면 추가적인 에너지 공급 없이도 그 상태를 유지할 수 있다. 하지만 기존의 이중 안정 로봇 그리퍼는 한 번 설정된 에너지 장벽(상태 전환에 필요한 에너지)을 바꿀 수 없어 다양한 작업에 유연하게 대처하기 어려웠다.
연구팀은 씨앗 꼬투리가 성숙 단계에 따라 씨앗 분산에 필요한 에너지 장벽을 조절하는 방식에서 아이디어를 얻었다. 성장기에는 높은 에너지 장벽을 유지해 씨앗의 조기 분산을 막고, 성숙하면 에너지 장벽을 낮춰 빗방울 같은 작은 자극에도 폭발적으로 씨앗을 흩뿌리는 원리를 핑크 슬롯 사이트 그리퍼에 적용했다.
새롭게 개발된 그리퍼는 클램프와 연결된 ‘이중 안정 탄성 빔’으로 구성되어 있다. 모터로 회전축을 조작해 빔의 곡률을 조절함으로써 에너지 장벽을 동적으로 변경할 수 있다. 이를 통해 그리퍼는 낮은 에너지 장벽 상태에서는 단 0.66뉴턴의 힘으로도 물체를 잡을 수 있을 만큼 민감하게 반응하고, 물체를 잡은 후에는 에너지 장벽을 높여 12.08뉴턴의 힘까지 견디는 강력하고 안정적인 그립력을 제공한다.
연구팀은 핑크 슬롯 사이트 그리퍼를 드론에 통합하여 실제 응용 사례를 시연했다. 드론은 그리퍼를 이용해 나뭇가지에 앉은 후 추가적인 에너지 소비 없이 강한 바람에도 안정적으로 매달려 있을 수 있었다. 필요에 따라 블루투스 제어를 통해 그리퍼를 풀고 이륙하는 것도 가능했다.
연구팀은 “이 그리퍼는 빠른 반응 속도와 프로그래밍 가능한 힘 조절 기능으로 차세대 로봇 시스템의 새로운 가능성을 열었다”며, “환경 모니터링 센서 부착 등 다양한 분야에서 로봇의 기능을 크게 확장할 수 있을 것”이라고 말했다. 이번 연구는 로봇 그리퍼 기술의 중요한 진전을 의미하며, 앞으로 더 발전된 로봇 시스템 개발에 기여할 것으로 기대된다. 연구 논문은 과학 파트너 저널(SPJ) 프로그램의 첫 번째 저널 ‘리서치’에 발표됐다.(논문 제목:Instant Energy Barrier Modulation in Bistable Robotic Grippers for Compliant Triggering and Powerful Grasping)
ksjang@irobotnews.com