일본 ‘인트-볼2’와 독일 ‘사이먼’, 우주궤도상 실시간 통신·공동작업 수행
일본 우주항공연구개발기구(JAXA)와 독일항공우주센터(DLR)는 국제우주정거장(ISS)에서 각 기관이 독자적으로 개발한 두 대의 로봇이 서로 통신하고 협업하는 실증 미션인 ‘이치반(ICHIBANㆍIntBall-2 CIMON Hovering Intelligences)’을 성공적으로 수행했다고 지난달 31일 발표했다.
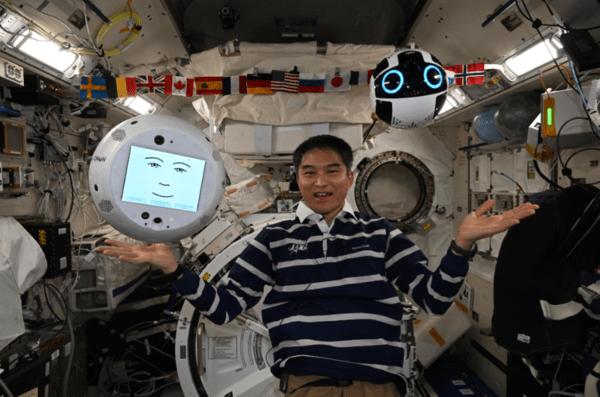
이번 실험에는 JAXA가 개발한 캠코더 시스템 실증 2호기 ‘인트-볼(Int-Ball)2’와 DLR·에어버스·IBM이 공동 개발한 AI 탑재 로봇 ‘사이먼(CIMONㆍCrew Interactive MObile companioN)’이 투입됐다. 두 로봇은 각각 ISS내 일본 실험모듈인 ‘키보(Kibo)’와 유럽 실험모듈인 ‘콜럼버스(Columbus)’에 설치돼 궤도상에서 협력 작업을 수행했다.
이번 실험은 유럽 실험동에 있는 일본인 우주비행사가 사이먼에 음성 명령을 내리고, 사이먼은 이를 인식해 일본 실험동에 있는 인트-볼2를 원격 조작하는 방식으로 진행됐다. 사이먼은 음성 명령과 인트-볼2가 전송한 위치 정보를 바탕으로 이동 명령을 생성해 인트-볼2에 전달했고, 인트-볼2는 해당 명령에 따라 이동하며 카메라로 촬영한 실시간 영상을 사이먼의 디스플레이에 전송했다. 우주비행사는 이를 통해 실험동 내 물품을 탐색하는 임무를 수행했다.
이번 이치반 미션은 서로 다른 기관에서 독자 개발한 로봇이 우주 공간에서 실시간으로 상호 통신하고 협력 작업을 수행한 세계 최초의 사례다. JAXA와 DLR은 이번 실증을 통해 ▲로봇 간 연계 인터페이스 확립 ▲지상과 궤도 간 통신 ▲지상 운용 절차 정립이라는 세 가지 기술적 목표 중 전자 두 항목의 실증에 성공했다고 밝혔다.
양 기관은 이 미션에서 도출된 성과가 향후 우주비행사와 로봇 간 효율적인 협업 체계를 구축하는 기반이 될 것으로 기대하고 있다.
한편 인트-볼2는 JAXA가 개발한 드론형 영상 촬영 로봇으로, ‘키보’ 실험동 내부를 자동 또는 원격으로 비행하며 사진과 영상을 촬영해 우주인의 작업 부담을 줄인다. 사이먼은 DLR·에어버스·IBM이 개발한 AI 기반의 음성 인식 로봇으로, 우주인의 스트레스를 낮추고 작업 효율을 높이는 실증을 위해 운용되고 있다.
JAXA는 “이치반이라는 명칭이 상징하듯 이번 미션은 우주 로봇 협업의 첫걸음”이라며 “앞으로도 국제 협력을 통해 ‘키보’를 로봇 기술 실증의 거점으로 활용하고, 유인 우주 활동의 자율화 및 효율화에 필요한 기술 개발을 지속해 나갈 것”이라고 밝혔다.