소프트 로보틱스(Soft Robotics) 에 논문 발표
美 버지니아공대(Virginia Tech) 연구팀이 이동이 불편한 사람들을 위해 소프트 그리퍼를 갖춘 슬롯나라무료 팔을 개발했다고 밝혔다. 이 슬롯나라무료은 피자를 만들 수 있을 정도로 다양한 물체를 집어 들고 조작할 수 있어, 장애인의 일상 자립을 도울 혁신 기술로 주목받고 있다.
연구 결과는 최근 로봇 전문 학술지 '소프트 로보틱스(Soft Robotics)'에 발표됐다. (논문 제목: Combining and Decoupling Rigid and Soft Grippers to Enhance Robotic Manipulation). 이 로봇 시스템은 사람이 하는 동작을 자연스럽게 모방할 수 있도록 설계됐으며, 복잡한 작업도 직관적으로 수행할 수 있도록 개발됐다.
로봇 팔을 개발한 기계공학과 딜런 로지(Dylan Lossy) 교수는 “사람을 돕기 위한 로봇은 인간의 움직임과 연결되어야 한다”며, “단순히 기능만 갖춘 시스템이 아닌, 사용자 친화적이고 직관적인 도구가 되어야 한다”고 강조했다.
이번 연구는 60만달러 이상의 연구비와 대학원생 연구원들의 협력을 바탕으로 진행됐다. 연구팀은 모래알처럼 작은 물체부터 무거운 물통까지 다양한 크기와 형태의 물건을 집을 수 있는 새로운 소프트 그리퍼(gripper)를 개발했다. 이 기술은 피자 재료처럼 다양한 식재료도 다룰 수 있을 정도의 정밀성과 적응력을 보였다.
기존 로봇 그리퍼는 물체를 “꼬집는” 방식으로 집기 때문에 스프링클 같은 작은 물체나 불규칙한 물건을 다루는 데 한계가 있다. 연구팀은 이를 해결하기 위해 ‘리지드 로보틱스’라는 접근법을 채택, 부드러운 소재의 손끝과 단단한 골격을 조합한 소프트 그리퍼를 설계했다.
이 손끝은 공기압을 활용한 접착 메커니즘을 갖추고 있어, 접촉 시 결합하고 공기를 넣으면 해제된다. 이를 통해 시럽병 같은 단단한 물체뿐만 아니라 마시멜로, 스프링클처럼 부드럽고 불규칙한 소재도 안정적으로 조작할 수 있다.
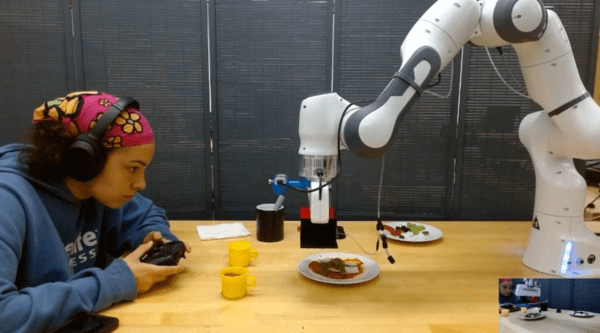
로봇 팔의 성능을 검증하기 위해 연구팀은 피자 만들기에 도전했다. 로봇은 사용자의 입력을 받아 피자 팬을 들고, 크러스트 반죽을 펼치고, 소스와 토핑을 얹는 과정을 성공적으로 수행했다. 연구팀은 조이스틱 기반의 제어 인터페이스와 인공지능(AI)을 결합해, 사용자의 명령을 해석하고 다음 행동을 예측하는 기능도 탑재했다. 이를 통해 로봇이 단순 반복이 아닌 맥락 기반의 작업 수행이 가능해졌다는 평가를 받았다.
이번 연구는 미국 국립과학재단(NSF)의 지원을 받아 수행됐다. 연구팀은 이 슬롯나라무료 기술이 장애인들의 일상 업무 수행을 도울 수 있는 핵심 도구가 될 것으로 기대하고 있다.