고려대·취리히 연방공대·UCLA 공동 연구...‘아카이브(arXiv)’에 논문 게재
4족보행 플래티넘 슬롯 등 다리를 갖고 있는 플래티넘 슬롯들은 다양한 지형을 이동할 수 있지만, 일반적으로 시뮬레이션 환경에서 훈련받은 작업만을 수행하며, 실제 환경에선 새로운 기술을 습득하는 데 상당한 한계를 갖고 있다.
테크엑스플로어 보도에 따르면, 고려대·취리히 연방공대(ETH Zurich)·UCLA 공동 연구팀은 기존의 4족보행 로봇 훈련 방식의 한계를 극복하기위해 개 훈련에서 영감을 받아 실제 세계에서 로봇 훈련을 단순화할 수 있는 새로운 프레임워크를 개발했다.
연구팀은 새로운 학습 프레임워크를 출판전 논문 공개 사이트인 ‘아카이브(arXiv)’에 공개했다. (논문 제목:Teaching Robots Like Dogs: Learning Agile Navigation from Luring, Gesture, and Speech)
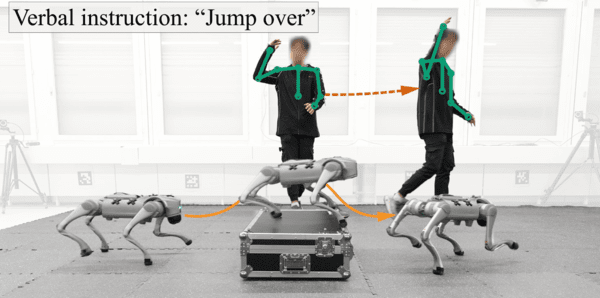
이 학습 방법은 사람이 개와 소통하는 방식과 유사하게 터치, 제스처, 음성 명령을 사용한다. 논문 제1저자인 윤태림은 "이번 연구는 개가 인간과의 지속적인 상호작용을 통해 새로운 행동을 학습하는 방식에서 영감을 받았다"며 "개는 고립된 상태에서 학습하지 않고, 사람의 몸짓과 사회적 신호를 관찰하고 따라하며 적응한다“고 말했다. 사람이 개를 훈련시키는 방식에서 이번 연구의 시사점을 얻었다는 설명이다.
연구팀은 개 훈련사를 관찰하고 그들이 개에게 새로운 동작을 가르치는 방식을 참고했다고 밝혔다. "개 훈련사들이 종종 간식이나 장난감을 활용해 개를 유인하고 행동을 형성하는 것을 발견했다"며 "개는 시간이 지나면서 행동을 학습하게 되면 보상 활동 없이도 명령에 직접 반응하며 동작을 수행할 수 있다. 우리의 접근법도 비슷한 원리를 따른다"고 설명했다.
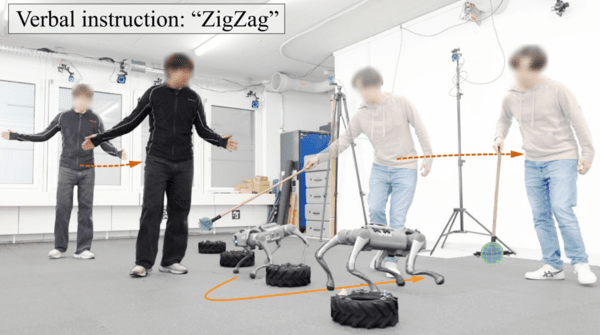
연구팀은 간식이나 장난감에 의존하는 대신, 훈련봉을 사용했다. 4족보행 로봇은 훈련봉의 안내를 따르는 방식으로 인간과 상호작용하고 새로운 기술과 행동을 학습할 수 있다.
연구팀은 "로봇이 이러한 행동을 학습하면 더 이상 훈련봉이 필요하지 않고 제스처와 음성 명령에 직접 반응할 수 있다"며 "기술적인 관점에서 우리는 데이터 효율성에 집중했는데, 인간으로부터 상호작용 데이터를 반복적으로 수집하는 것이 부담스러워질 수 있기 때문"이라고 말했다.
연구팀이 개발한 프레임워크에는 플래티넘 슬롯이 인간과 상호작용한 장면을 시뮬레이션에서 재현하는 '장면 재구성 모듈'도 포함하고 있다.
연구팀이 실제 4족보행 플래티넘 슬롯에 이 프레임워크를 적용한 결과 매우 유망한 결과를 얻었다. 플래티넘 슬롯은 사용자에게 접근하기, 장애물 뛰어넘기, 장애물 주변을 지그재그로 이동하기 등 새로운 행동을 97.15%의 성공률로 빠르게 습득할 수 있었다.
연구팀은 "로봇이 일상적인 가정 환경에 침투하기 시작했다"면서 "제조업체가 광범위한 기능을 로봇에 내장해 제공하더라도 복잡한 인간 환경에서 작동할 때는 항상 한계가 있다. 사용자가 새로운 행동을 직접 가르칠 수 있게 하는 것은 강력한 대안이 될 수 있다"고 말했다. 로봇이 프로그래밍이나 전문가의 개입이 아니라 자연스러운 상호작용을 통해 원하는 행동을 학습할 수 있다면, 비전문가 사용자도 훨씬 더 쉽게 로봇을 자신의 필요에 맞게 조정할 수 있다는 것이다.
연구팀은 향후 '동작'과 '물체 상호작용'을 결합하는 ‘이동-조작(loco-manipulation)’ 작업에도 이번에 개발한 프레임워크를 적용할 계획이다.
백승일 기자 robot3@irobotnews.com