‘사이언스 로보틱스(Science Robotics)’에 논문 발표
구글 딥마인드와 인트린식(Intrinsic), 유니버시티 칼리지 런던(UCL) 공동 연구팀이 인공지능(AI) 기반 다중 로봇 제어 시스템을 개발했다고 더로봇리포트가 3일 보도했다.
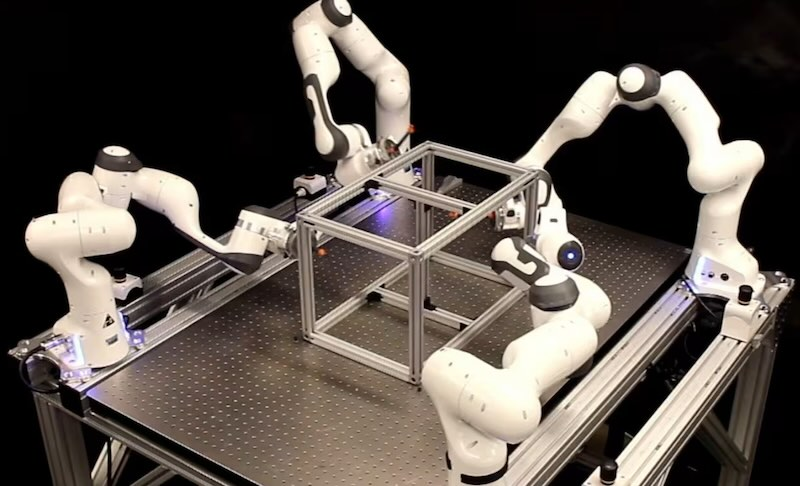
산업용 로봇 프로그래밍은 오랜 시간과 복잡한 과정을 필요로 하는 작업이다. 특히 여러 로봇이 한 공간에서 동시에 작업할 때 충돌을 피하고 효율적인 동선을 짜는 것은 매우 어려운 문제다. 이러한 난제를 해결하기 위해 연구팀은 ‘그래프 신경망(GNN)’과 강화 학습을 결합해 여러 대의 로봇이 충돌 없이 유기적으로 움직일 수 있는 최적의 동선을 스스로 학습하고 계획하는 AI 모델을 선보였다. 그래프 신경망(Graph Neural Network)은 복잡한 관계를 가진 데이터를 처리하고 분석하도록 설계된 인공지능 모델의 한 종류다. GNN은 데이터를 노드(node)와 엣지(edge)로 구성된 그래프(graph) 형태로 이해한다. 노드는 사람, 사물, 장소와 같은 개별적인 객체를 의미하고, 엣지는 노드 간의 연결이나 관계를 나타낸다.
이번 연구 성과는 국제 학술지 ‘사이언스 로보틱스(Science Robotics)’에 발표됐다. (논문 제목:RoboBallet: Planning for Multi-Robot Reaching with Graph Neural Networks and Reinforcement Learning)
기존 로봇 모션 계획 알고리즘은 로봇의 수가 늘어날수록 계산량이 기하급수적으로 증가하는 문제가 있다. 이번에 개발된 AI 모델은 작업장의 모든 로봇과 장애물, 목표물을 그래프 형태로 인식한다. 이 그래프를 통해 로봇 간의 관계와 환경 정보를 파악하고, 수백만 개의 가상 시나리오를 통해 시행착오를 거치며 최적의 모션 전략을 스스로 터득한다.
연구팀은 실험실 평가를 통해 이 시스템이 최대 8대의 슬롯 배당에 대해 충돌 없는 동작 계획을 단 몇 초 만에 생성하며, 기존 방식 대비 궤적 품질을 약 25% 향상시켰다고 밝혔다. 또한, 슬롯 배당이 4대에서 8대로 늘어났을 때 작업 실행 시간이 평균 60% 감소하는 확장성을 보였다. 이는 슬롯 배당 시스템이 복잡해질수록 효율성이 오히려 증가할 수 있음을 의미한다.
이 기술은 슬롯 배당 프로그래밍에 필요한 수동 코딩이나 티치 펜던트 조작 과정을 대폭 줄여줄 것으로 기대된다. 슬롯 배당에게 고차원적인 작업 목표만 주어지면, AI가 알아서 행동 순서와 충돌 없는 궤적을 자동으로 생성하기 때문이다.
구글 딥마인드와 인트린식은 이번 AI 모델이 앞으로 다양한 산업 현장에서 슬롯 배당 자동화의 확장성을 높이고, 생산 라인의 유연성을 극대화하는 데 핵심적인 역할을 할 것으로 기대했다. 특히, 동적인 환경 변화에 실시간으로 대응하며 작업을 재계획하는 기술로 발전할 경우, 슬롯 배당의 활용 범위가 더욱 넓어질 것으로 보인다.
한편 지난 2021년 알파벳의 '문샷 팩토리'인 X에서 분사한 인트린식(Intrinsic)은 산업용 슬롯 배당을 더 쉽고 효율적으로 만들겠다는 목표로 출범한 기업이다. 기존의 복잡한 프로그래밍 과정을 간소화하고 슬롯 배당 자동화의 대중화를 이끌겠다는 포부다.
인트린식은 출범 이후 내부 R&D와 적극적인 인수합병을 통해 몸집을 키워왔다. 특히 2022년에는 로봇 운영 체제(ROS) 개발로 유명한 오픈 소스 로보틱스 재단(Open Source Robotics Foundation)의 영리 부문인 오픈 소스 로보틱스 코퍼레이션(OSRC)을 인수하며 업계의 주목을 받았다. 인트린식의 이러한 행보는 로봇 기술의 진입 장벽을 낮추고, 더 많은 기업이 자동화를 도입할 수 있도록 돕는 데 초점을 맞추고 있다.
ksjang@irobotnews.com