‘바이오로지컬 사이버네틱스’(Biological Cybernetics)’에 논문 게재
美 카네기멜론대(CMU) 산하 ‘바이오하이브리드 및 유기로봇그룹(BORG·Biohybrid and Organic Robotics Group) 연구팀이 ’바다 민달팽이‘의 먹이 섭취 행동에서 영감을 받아 새로운 소프트 로봇을 설계했다고 밝혔다.
기계공학과 비키 웹스터-우드 교수 지도 아래 진행된 이번 연구는 바다 민달팽이의 먹이 섭취 과정에서 신경계가 근육과 어떻게 상호작용하는지를 심층적으로 이해하는 데 초점을 맞추고 있다. 특히 먹이를 물거나 삼키고, 때로는 뱉어내는 동안의 근육 움직임에 주목했다. 연구팀은 이러한 생체 역학적 통찰을 바탕으로 단단한 부품 없이 유연하게 움직이는 소프트 로봇을 설계했다.
이번 연구는 전문 학술지인 ‘바이오로지컬 사이버네틱스’(Biological Cybernetics)’에 게재됐다.(논문 제목:incorporating buccal mass planar mechanics and anatomical features improves neuromechanical modeling of Aplysia feeding behavior)
연구팀은 바다 민달팽이의 섭식 행동이 어떻게 발생하고, 민달팽이의 해부학적 구조 내에서 어떤 방식으로 작동하는지를 분석했다. 이를 위해 민달팽이의 입 구조를 모방한 컴퓨터 모델을 구축했다. 기존 모델이 1차원 구조로 근육 움직임을 근사화했던 것과 달리, 이번 프로젝트에서는 행동 과정 중 근육의 형태 변화를 더욱 정확하게 반영하기 위해 2차원 구조를 활용했다.
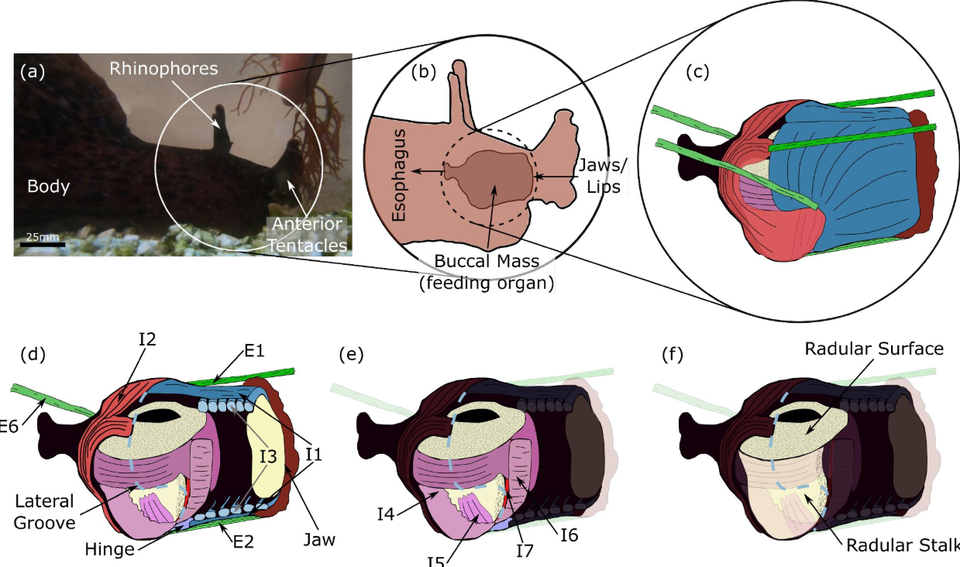
논문 제1저자인 마이클 베닝턴 박사과정 학생은 “우리는 행동 중에 이러한 위치가 어떻게 움직이고 형태가 변하는지 파악하기 위해 입안의 주요 랜드마크를 찾는 데 집중했다”며, “컴퓨터 모델은 입을 1차원으로 묘사하는 대신 근육 중 하나의 모양을 감싸는 직사각형을 사용하며, 이 직사각형의 네 모서리를 통해 추가 근육이 상호 연결될 수 있다”고 설명했다. 이같은 상세한 접근 방식은 연구팀이 근육의 움직임을 더욱 자유도 높게 포착하고 반영할 수 있도록 했다.
연구팀은 모델링을 통해 민달팽이의 입에 존재하는 두 가지 핵심 부분, 즉 먹이를 잡고 삼키는 역할을 하는 ‘그래스퍼(grasper)’와 입구인 ‘내강(lumen)’의 기능을 파악했다. 특히 이 두 부분을 연결하여 그래스퍼가 회전할 수 있도록 돕는 ‘힌지(hinge)’라는 구조에 주목했다. 이 힌지는 일반적인 힌지와 달리 여러 지점에 고정된 3차원 구조를 가지고 있다. 현재의 2차원 모델로는 힌지의 복잡한 기능을 온전히 포착하기 어렵다는 한계점도 확인됐다. 연구팀은 향후 힌지를 더욱 효과적으로 모델링하여 시스템의 3차원 역학을 포착하는 데 집중할 계획이다.
카네기 멜론대 연구팀은 소프트 로봇, 바이오하이브리드 로봇, 생체모방 로봇 연구에 전념하고 있다. 이들은 로봇을 이용해 생물학적 시스템을 더 깊이 이해하고, 생물학적 유기 물질을 활용해 더욱 적응력 있고 지속 가능한 소프트 로봇을 개발하는 것을 목표로 하고 있다. 소프트 바디 시스템은 강체 시스템보다 훨씬 큰 자유도를 가지기 때문에 제어가 까다롭지만, 기존 강체 시스템의 한계를 극복할 수 있을 것으로 기대하고 있다.
민달팽이는 약 12개의 근육과 4000개의 뉴런만으로도 복잡한 먹이 섭취 행동을 할수 있어 이러한 프로젝트를 추진하는데 이상적인 모델 유기체로 꼽힌다.
이번 연구는 민달팽이 관련 첫 번째 프로젝트는 아니다. BORG 연구팀은 이전에 민달팽이의 행동을 모델링한 로봇인 ‘슬러그봇(SlugBot)’을 개발하고 관련 논문을 여러 차례 발표했다. 베닝턴은 “이번 연구의 장점 중 하나는 계산 및 수학적 모델뿐만 아니라 물리적인 모델도 활용하여 무언가를 설명하려 한다는 것”이라고 말했다. 소프트 로봇 기술이 발전함에 따라, 민달팽이에서 얻은 통찰력이 다른 소프트 로봇의 시뮬레이션 및 학습에도 크게 기여할 것으로 기대된다.
ksjang@irobotnews.com