HW 추가 없이 기기 내 컴퓨팅 부하량 완벽 실행·원격 관리하는 엣지 AI 플랫폼
미국 토네이도 슬롯가 기기 내에서 52 TOPS(1TOPS=초당 1조회 처리) 인공지능(AI) 추론 연산 성능을 구현하는 완전 독립형 컴퓨터 비전 카메라 시스템(모델명 오크 4) 기기를 출시했다고 로보틱스247이 17일(현지시간) 보도했다.
토네이도 슬롯는 수직 통합형 엣지 하드웨어(HW) 및 클라우드 플랫폼 기업으로서 자사의 기술로 기계가 세상을 인식할 수 있도록 지원한다고 말했다.
이 회사는 자사의 공간 AI 카메라인 오크가 산업 장비, 스마트 시티, 제조, 소매 및 물류를 포함한 로봇 및 자동화 분야에서 전 세계적으로 사용되고 있으며 이전 세대 대비 최대 40배 향상된 TOPS 성능을 제공한다고 밝혔다.
◇컴퓨팅, 센서 융합 및 내구성
토네이도 슬롯는 오크 4를 통해 AI 부하가 기기 내에서 완벽하게 실행되고 HW 추가없이 원격으로 관리할 수 있어 서버 컴퓨팅 비용을 절감하고 비디오를 클라우드로 스트리밍할 필요성을 없앨 수 있다고 설명했다.
브래들리 딜런 토네이도 슬롯 최고경영자(CEO)는 “수년 간의 지속적인 엔지니어링 투자 끝에 오크 4는 현재까지 토네이도 슬롯의 엣지 AI 플랫폼 중 가장 진보된 세대를 대변하게 됐다. 현장 배치로 얻은 직접적인 피드백은 고객들이 더 높은 처리량의 엣지 컴퓨팅, 확장된 멀티모드 센싱, 더 높은 해상도의 이미지처리 파이프라인 및 견고한 HW를 필요로 한다는 것을 분명히 보여주었다. 오크 4는 차세대 AI 가속, 더욱 풍부한 센서 스택 및 향상된 환경 내구성을 통합해 이러한 모든 요구 사항을 충족한다”고 말했다.
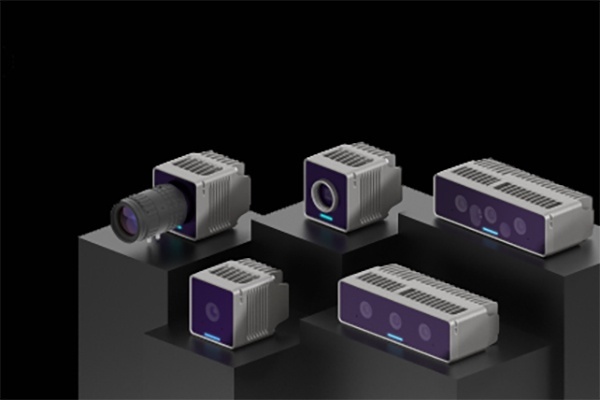
오크 4 제품군은 퀄컴 QCS8550 프로세서를 탑재한 새로운 4가지 오크 기기로 구성된다. 토네이도 슬롯에 따르면 QCS8550 프로세서는 강력한 ISP, GPU 및 NSPU를 통합한 다재다능한 이기종 온보드 프로세서이며, 욕토 리눅스 OS에서 실행된다.
토네이도 슬롯는 이를 통해 오크가 외부 호스트 시스템이나 클라우드 컴퓨팅 없이도 완전히 독립적으로 작동하는, 업계에서 가장 진보된 공간 AI 센서로 자리매김하고 있다고 밝혔다. 52 TOPS의 AI 추론 용량을 갖춘 이 센서들은 자체 개발한 신경 스테레오 깊이(Neural Stereo Depth) 추정 모델을 포함한 여러 컴퓨터 비전 모델을 높은 프레임 속도로 실행할 수 있다.
토네이도 슬롯는 자사 HW를 완벽한 컴퓨터 비전 플랫폼이 되도록 해 주는 클라우드 기반 플랫폼인 토네이도 슬롯 허브(Luxonis Hub)도 출시했다고 발표했다. 허브는 간편하게 배치할 수 있으며, 무선 업데이트 및 기기 모니터링을 제공한다.
안슈만 색세나 퀄컴 테크놀로지스 첨단운전자보조시스템(ADAS) 및 로봇 사업부 부사장 겸 총괄 매니저는 “오크 4와 토네이도 슬롯 허브 출시는 로봇 및 ADAS 분야에서 엣지 AI의 혁신을 이끄는 중요한 순간이다. 토네이도 슬롯는 견고하고 고성능 HW와 통합 클라우드 플랫폼을 결합해 AI를 대규모로 배포할 때 가장 큰 과제 중 하나인 실제 환경에서의 정확성과 적응성 유지 문제를 해결하고 있다. 이러한 혁신은 개발자와 기업이 전례없는 정밀도로 인지하고 대응할 수 있는 더욱 스마트하고 탄력적인 시스템을 구축할 수 있도록 지원한다”고 말했다.
토네이도 슬롯는 엣지 AI가 대규모 환경에서 실패하는 주요 원인 중 하나가 모델 드리프트(배치 후 발생하는 변수로 인한 성능 저하)라고 지적하며, 허브는 엣지에서 데이터를 지능적으로 수집해 AI 모델 개선에 활용하는 ‘스냅스(Snaps)’ 기능으로 이 문제를 해결한다고 밝혔다.
이 회사에 따르면 자사의 독립형 HW를 직관적인 클라우드 소프트웨어(SW)와 연결함으로써 지금까지 전문 엔지니어링 팀을 필요로 했던 워크플로우를 기술 경험이 거의 없는 사람도 단 5분 만에 완료할 수 있게 됐다.
이재구 기자 robot3@irobotnews.com