'사이언스 어드밴시스'에 연구 논문 발표
'싱가포르-MIT 연구기술 동맹(SMART·Singapore-MIT Alliance for Research and Technolog)'과 싱가포르 국립대, MIT, 난양이공대 공동 연구팀은 소프트 로봇이 다양한 작업과 예기치 못한 교란 상황에서도 안정적으로 동작할 수 있도록 지원하는 AI 제어 기술을 개발했다고 4일 밝혔다.
SMART의 학제간 연구그룹 'M3S(Mens, Manus & Machina)'가 주도한 이번 연구는 소프트 로봇이 한 번의 학습만으로 다양한 동작과 작업을 수행하고, 재훈련 없이 새로운 환경에 즉각 적응할 수 있도록 지원한다. 이 시스템은 보조 로봇, 재활 로봇, 웨어러블 및 의료용 소프트 로봇 등 분야에서 활용될 수 있을 것으로 기대된다.
연구팀에 따르면, 기존 경직된 모터와 관절로 움직이는 딱딱한 로봇과 달리, 소프트 로봇은 부드러운 고무 등 유연한 소재로 만들어지며 인공 근육 역할을 하는 특수 액추에이터를 통해 작동한다. 소프트 로봇은 유연한 특성 때문에 섬세한 작업을 하는데 적합하지만, 형태가 예측 불가능하게 변하기 때문에 제어하는게 매우 까다로웠다. 특히 실제 환경은 복잡하고 예상치 못한 방해 요소가 많아 무게 변화나 기류 변화, 사소한 하드웨어 결함만으로도 움직임에 오류가 발생했다.
기존 소프트 로봇에 대한 연구 성과들은 실제 환경에서 지능적으로 작동하는 데 필요한 세 가지 핵심 능력, 즉 학습 내용의 다른 작업으로의 전이, 상황 변화에 대한 신속한 적응, 적응 중 안정성 및 안전성 보장 중 한두 가지만 달성할 수 있었다. 이러한 한계가 소프트 로봇의 실용화에 큰 장벽으로 인식됐다.
연구팀은 이 세 가지 능력을 모두 구현한 새로운 AI 제어 시스템을 개발했다고 밝혔다. 연구팀은 이번 연구를 통해 한번 학습으로 다양한 작업을 수행하고, 새로운 상황에 적응할수 있는 소프트 로봇 제어 기술을 개발하고, 전문 학술지인 '사이언스 어드밴시스'에 논문을 발표했다. (논문 제목:A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations)
이 시스템은 인간 뇌의 학습 및 적응 메커니즘에서 영감을 받았으며, 두 가지 상호 보완적인 '시냅스' 세트로 구성된다. '구조적 시냅스(structural synapses)'는 팔을 구부리거나 펴는 것과 같은 기본 동작을 오프라인으로 학습해 안정적인 기반을 제공한다. '가소성 시냅스(plastic synapses)'는 카지노 슬롯 머신이 작동하는 동안 실시간으로 업데이트되어 현재 상황에 맞춰 행동을 미세 조정한다. 내장된 안정성 측정 장치가 안전장치 역할을 하여, 온라인 적응 중에도 부드럽고 제어된 동작을 유지한다.
싱가포르국립대 박사후 과정에서 이번 연구를 주도하고, 지금은 중국 난징 소재 동남대에 재직 중인 당 즈창(Zhiqiang Tang) 교수는 "이 시스템은 소프트 로봇이 사회와 산업에서 사용되는 데 필요한 세 가지 핵심 능력을 모두 달성한 최초의 일반 소프트 로봇 제어기 중 하나"라며 "오프라인 학습 내용을 다양한 작업에 적용하고, 새로운 조건에 즉시 적응하며, 전 과정에서 안정성을 유지할 수 있다"고 설명했다.
MIT 컴퓨터 과학 및 인공지능 연구소(CSAIL) 소장이자 M3S 공동 수석 연구책임자인 다니엘라 루스(Daniela Rus) 교수는 "구조적 학습과 실시간 적응성을 결합해 예측 불가능한 환경에서 소프트 소재의 복잡성을 처리할 수 있는 시스템을 만들었다"며 "다재다능한 소프트 로봇이 병원, 공장, 일상생활에서 안전하고 지능적으로 작동하는 미래에 한 걸음 더 가까워졌다"고 강조했다.
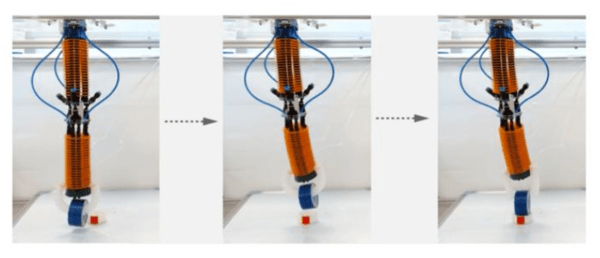
연구팀은 케이블 구동 소프트 팔과 형상 기억 합금 작동 소프트 팔 두 가지 플랫폼에서 시스템을 검증했다. 실험 결과 심한 외란(방해) 조건에서 소프트 카지노 슬롯 머신의 추적 오류가 44~55% 감소했고, 하중 변화, 기류 방해, 액추에이터 고장 시에도 92% 이상의 형태 정확도를 달성했다. 특히 액추에이터 절반이 고장난 상황에서도 안정적인 성능을 유지했다.
싱가포르 국립대 체칠리아 라스키(Cecilia Laschi) 교수는 "이 연구는 작업별 조정에서 인간과 같은 지능을 가진 진정한 일반화 가능한 프레임워크로 패러다임을 전환했다"며 "실제 환경에서 작동 가능한 확장 가능하고 지능적인 소프트 기계로의 문을 여는 획기적인 성과"라고 평가했다.
이번 성과는 제조, 물류, 검사, 의료 카지노 슬롯 머신 분야에서 지속적인 재프로그래밍 없이도 강력한 소프트 카지노 슬롯 머신 시스템을 개발할 수 있는 가능성을 제시한다. 의료 분야에서는 보조 및 재활 장치가 환자의 변화하는 상태에 자동으로 맞춤 대응할 수 있어 안전성과 치료 효과를 높일 수 있을 것으로 기대된다.
연구진은 향후 이 기술을 더 빠른 속도와 복잡한 환경에서 작동하는 카지노 슬롯 머신 시스템으로 확장하고, 보조 카지노 슬롯 머신, 의료 기기, 산업용 소프트 매니퓰레이터 및 실제 자율 시스템에 통합할 계획이다.
이번 연구는 싱가포르 국립연구재단의 '연구 우수성 및 기술 기업 캠퍼스'(CREATE·Campus for Research Excellence and Technological Enterprise) 프로그램의 지원을 받아 수행됐다.
백승일 기자 robot3@irobotnews.com