세계적 학술지 ‘Science Robotics’ 논문 게재
콤팩트한 보관·고강도 전개 동시 구현
차세대 전개형 라스베가스 카지노 슬롯 머신 시스템 적용 기대
서울대학교 연구팀이 종이접기 원리를 응용해 접고 말 수 있으면서도 펼쳤을 때는 튼튼한 강도를 유지하는 새로운 구조를 개발했다.
27일 서울대 조규진 교수(기계공학부·인간중심 소프트 로봇 기술 연구센터장) 연구팀은 인터레이싱(interlacing) 원리를 적용한 ‘접고 말 수 있는 주름 구조(FoRoGated-Structure)’를 개발했다고 밝혔다. 이번 연구 결과는 26일 국제 학술지 ‘사이언스 로보틱스(Science Robotics)’에 게재됐다.
기존 롤링 방식 구조물은 줄자처럼 중심 허브에 말아 보관할 수 있어 공간 활용성이 뛰어나다. 하지만 주름 구조를 겹겹이 접어 말 경우 재료 두께 때문에 안쪽과 바깥쪽 층의 둘레 차이로 찌그러짐이 발생한다. 이 때문에 주름을 펼쳐 평판 상태로 감아야 했고, 구조가 길어질수록 보관에 필요한 폭이 넓어지는 한계가 있었다.
연구팀은 이 문제를 해결하기 위해 여러 요소를 교차시켜 맞물리게 하는 인터레이싱 원리를 도입했다.
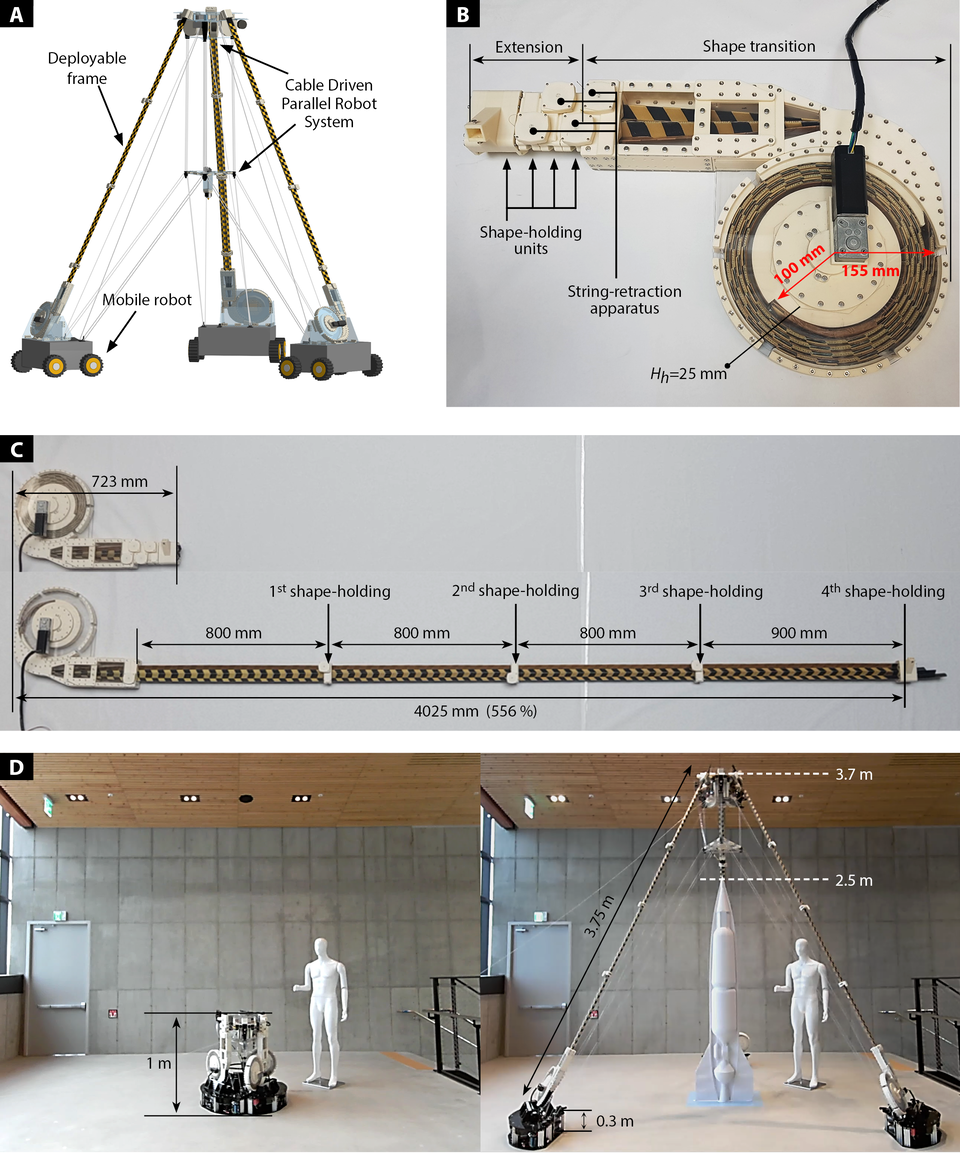
길이 방향으로 배열한 금속 패널들을 접착제로 붙이지 않고 리본으로 촘촘히 엮어 고리 형태의 조인트를 만들었다. 이 구조는 패널 간 조밀한 구속을 제공하면서도, 고리 틈을 따라 패널이 국소적으로 미끄러질 수 있어 겹겹이 접힌 상태에서도 부드럽게 말 수 있다.
평평한 종이는 유연하지만 지그재그 주름을 만들면 인접 면들이 서로의 변형을 구속해 훨씬 튼튼해지는 것처럼, 이 구조도 보관 시에는 평평한 단면으로 부드럽게 감기다가 전개 시에는 주름 단면으로 전환돼 높은 강도를 확보한다.
이는 곧 유연성과 강도를 동시에 충족하는 구조를 구현할 수 있게 된다.
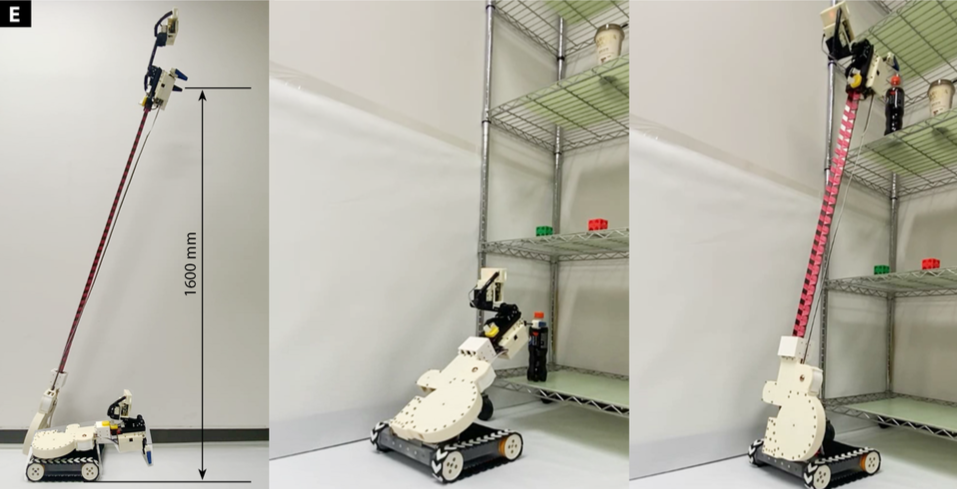
연구팀은 실용 가능성을 입증하기 위해 단일 모터로 구동되는 ‘길어지는 로봇 팔’을 제작했다. 로봇 청소기 크기의 소형 모바일 로봇에 이 기술을 적용한 결과, 수납 시에는 낮은 높이를 유지하다가 팔을 전개하면 선반 정리나 엘리베이터 버튼 누르기 같은 높은 위치 작업을 수행할 수 있었다.
이 기술이 상용화되면 로봇 청소기는 바닥 먼지만 치우는 기기를 넘어, 아이들의 장난감 정리나 세탁물 옮기기 등 집 안 곳곳에서 ‘팔 달린 가사 로봇’으로 확장될 수 있다.
또한 지름 약 1m, 높이 약 1m의 모바일 로봇이 목표 위치에 도달한 후 밑변 약 3.2m, 높이 약 3.4m의 정삼각뿔 프레임으로 전개돼 높이 약 2.5m 구조물을 출력하는 모바일 3D 프린팅 로봇도 시연했다. 이 사례는 달·화성처럼 사람이 직접 가기 어려운 환경에서 로봇이 스스로 건축물을 세우고 이동하는 미래 건설 시스템의 가능성을 제시했다.
조규진 교수는 “우리는 종종 휴머노이드라는 한 가지 형태에 해법을 기대하지만, 현장의 많은 문제는 환경과 과업에 따라 달라진다”며 “이번 결과는 형태를 바꿔 공간과 과업에 맞게 전개되는 로봇이 피지컬 AI의 실용 플랫폼이 될 수 있음을 보여 준다”고 밝혔다.
이정환 기자 robotstory@irobotnews.com